



1、機器人報警“20252” 電機溫度高DRV1故障處理
處理方式:檢查電機是否過熱,如電機溫度正常則檢查連接電纜是否正常(可能是控制柜處航空插頭沒插好λ如果査不出問題,又著急用機器人,可臨時將報警信號短接,不過注意,此時電機真正過熱后也不會報警,可能會引起電機燒毀。
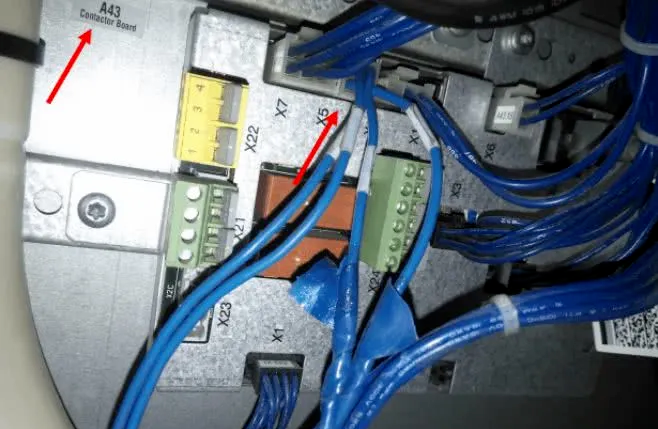
具體操作方式:在控制柜左下角找到A43板,找到板子上5插頭,上邊有4根線,其中線號為439和440的兩根線就是電機過熱報警信號線將兩根線從中間斷開,把板子這邊的兩根線短接即可。(如下圖)
2、ABB機器人電源模塊短路板短路故障處理
人為因素:熱插拔硬件非常危險,許多電路板故障都是熱插拔引起的,帶電插撥裝板卡及插頭時用力不當造成對接口、芯片等的損害,從而導致機器人電路板損壞;隨著使用機器人時間的增長,機器人電路板上的元器件就會自然老化,從而導致機器人電路板故障。
環境因素:由于操作者的保養不當,機器人電路板上布滿了灰塵,可以造成信號短路。
3、什么情況下需要為機器人進行備份
1.新機器第一次上電后。
2.在做任何修改之前。
3.在完成修改之后。
4.如果工業機器人重要,定期1周一次。
5.最好在U盤也做備份。
6.太舊的備份定期刪除,騰出硬盤空間。
4、什么情況下需要為工業機器人進行備份
上述情況是示教器和機器人主控制器之間沒有建立通訊連接,未建立連接的原因包括:
1.機器人主機故障。
2.機器人主機內置的cf卡(sd卡)故障。
3.示教器到主機之間的網線松動等。
處理方式:1.檢查主機是否正常,檢查主機內sd卡是否正常。
2.檢查示教器到主機網線是否連接正常。
5、機器人出現報警提示信息10106維修時間提醒是什么意思?
這種情況是ABB機器人智能周期保養維護提醒。
6、機器人在開機時進入了系統故障狀態如何處理?
1.重新啟動一次機器人。
2.如果不行,在示教器查看是否有更詳細的報警提示,并進行處理。
3.重啟。
4.如果還不能解除則嘗試B啟動。
5.如果還不行,請嘗試P啟動。
6.如果還不行請嘗試I啟動(這將機器人回到出廠設置狀態,小心)。
7、機器人備份可以多臺機器人共用嗎?
不能。比如說機器人甲A的備份只能用于機器人甲,不能用于機器人乙或丙,因為這樣會造成系統故障。
8、對于機器人備份中什么文件可以共享?
如果兩個機器人是同一型號,同一配置。則可以共享RAPID程序和EIO文件,但共享后也要進行驗證方可正常使用。
9、什么是機器人機械原點?機械原點在哪里?
機器人六個伺服電機都有一個唯一固定的機械原點,錯誤的設定機器人機械原點將會造成機器人動作受限或誤動作,無法走直線等問題,嚴重的會損壞機器人。
10、機器人50204動作監控報警如何解除?
1.修改機器人動作監控參數(控制面板—動作監控菜單中)以匹配實際的情況。
2.用AccSet指令降低機器人加速度。
3.減小速度數據中的v_rot選項。
11、機器人第一次上電開機報警“50296SMB內存數據差異”如何處理?
1.ABB主菜單中選擇校準。
2.點擊ROB_1進入校準畫面,選擇SMB內存。
3.選擇“高級”,進入后點擊“清除控制柜內存”。
4.完成后點擊“關閉”,然后點擊“更新”。
5.選擇“已交換控制柜或機械手,使用SMB內存數據更新控制柜”。
12、如何在RAPID程序里自定義機器人軌跡運動的速度?
1.在示教器主菜單中選擇程序數據。
2.找到數據類型Speeddata后,點擊新建。
3.點擊初始值,Speeddata四個變量含義分別為:v_tcp表示機器人線性運行速度,v_rot表示機器人旋轉運行速度,v_leax表示外加軸線性運行速度,v_reax表示外加軸旋轉運行速度,如果沒有外加軸則后兩個不用修改。
4.自定義好的數據就可在RAPID程序中進行調用了。
13、高速旋轉時出現電機差錯計數器溢出過錯怎么處理?
高速旋轉時發作電機差錯計數器溢出過錯。
對策1:查看電機動力電纜和編碼器電纜的配線是否正確,電纜是否有破損。
輸入較長指令脈沖時發作電機差錯計數器溢出過錯。
運轉過程中發作電機差錯計數器溢出過錯。
對策2:增大差錯計數器溢出水平設定值;減慢旋轉速度;延長加減速時間;負載過重,需求從頭選定更大容量的電機或減輕負載,加裝減速機等傳動組織提高負載才能。
14.在有脈沖輸出時不工作,怎么處理?
監督操控器的脈沖輸出當時值以及脈沖輸出燈是否閃爍,承認指令脈沖現已履行并現已正常輸出脈沖;
查看操控器到驅動器的操控電纜,動力電纜,編碼器電纜是否配線過錯,破損或許接觸不良;
查看帶制動器的伺服電機其制動器是否現已翻開;
監督伺服驅動器的面板承認脈沖指令是否輸入;
Run運轉指令正常;
操控形式必須挑選方位操控形式;
伺服驅動器設置的輸入脈沖類型和指令脈沖的設置是否共同;
確保正轉側驅動制止,回轉側驅動制止信號以及差錯計數器復位信號沒有被輸入,脫開負載而且空載運轉正常,查看機械體系。
15、沒有帶負載報過載,怎么處理?
假如是伺服Run(運轉)信號一接入而且沒有發脈沖的情況下發作:
查看伺服電機動力電纜配線,查看是否有接觸不良或電纜破損;假如是帶制動器的伺服電機則必須將制動器翻開;速度回路增益是否設置過大;速度回路的積分時間常數是否設置過小。
假如伺服只是在運轉過程中發作:
方位回路增益是否設置過大;定位完成幅值是否設置過小;查看伺服電機軸上沒有堵轉,并從頭調整機械。
16、運轉時出現反常聲音或顫動現象怎么處理?
伺服配線:
運用規范動力電纜,編碼器電纜,操控電纜,電纜有無破損;查看操控線附近是否存在干擾源,是否與附近的大電流動力電纜互相平行或相隔太近;查看接地端子電位是否有發作變化,實在確保接地杰出。
伺服參數:
伺服增益設置太大,主張用手動或主動方法從頭調整伺服參數;承認速度反應濾波器時間常數的設置,初始值為0,可測驗增大設置值;電子齒輪比設置太大,主張恢復到出廠設置;伺服體系和機械體系的共振,測驗調整陷波濾波器頻率以及幅值。
機械體系:
銜接電機軸和設備體系的聯軸器發作偏移,安裝螺釘未擰緊;滑輪或齒輪的咬合不良也會導致負載轉矩變化,測驗空載運轉,假如空載運轉時正常則查看機械體系的結合部分是否有反常;承認負載慣量,力矩以及轉速是否過大,測驗空載運轉,假如空載運轉正常,則減輕負載或替換更大容量的驅動器和電機。
17、ABB伺服電機修理做方位操控定位不準怎么處理?
首要承認操控器實際宣布的脈沖當時值是否和料想的共同,如不共同則查看并修正程序,監督伺服驅動器接收到的脈沖指令個數是否和操控器宣布的共同,如不共同則查看操控線電纜;查看伺服指令脈沖形式的設置是否和操控器設置得共同,如CW/CCW還是脈沖+方向;
伺服增益設置太大,測驗從頭用手動或主動方法調整伺服增益;伺服電機在進行往復運動時易產生累積差錯,主張在工藝答應的條件下設置一個機械原點信號,在差錯超出答應規模之前進行原點查找操作;機械體系本身精度不高或傳動組織有反常(如伺服電機和設備體系間的聯軸器部發作偏移等)。
18、伺服電機修理做方位操控運轉報超速故障怎么處理?
伺服Run信號一接入就發作:查看伺服電機動力電纜和編碼器電纜的配線是否正確,有無破損。
19、ABB機器人如何進行常規保養維護?
“剎車檢查” 正常運行前,需檢查電機剎車每個軸的電機剎車檢查方法如下:
1.運行每個機械手的軸到它負載最大的位置。
2.機器人控制器上的電機模式選擇開關打到電機關(MOTORS OFF)的位置。
3.檢查軸是否在其原來的位置如果電機關掉后,機械手仍保持其位置,說明剎車良好。
失去減速運行(250mm/s)功能的危險
不要從電腦或者示教器上改變齒輪變速比或其它運動參數。這將影響減速運行(250mm/s)功能。
20、安全使用示教器應該注意的幾點:
安裝在示教器上的使能設備按鈕(Enabling device),當按下一半時,系統變為電(MOTORS ON)模式。當松開或全部按下按鈕時,系統變為電機關(MOTORS OFF)模式。
21、為了安全使用示教器,必須遵循以下原則:
1.使能設備按鈕(Enabling device)不能失去功能編程或調試的時候,當機器人不需要移動時,立即松開能使設備按鈕(Enabling device)。
2.當編程人員進入安全區域后,必須隨時將示教器帶在身上,避免其他人移動機器人。
22、在機械手的工作范圍內工作需遵守以下幾點
1.控制器上的模式選擇開關必須打到手動位置,以便操作使能設備來斷開電腦或遙控操作;
2.當模式選擇開關在
3.注意機械手的旋轉軸,當心頭發或衣服攪到上面。另外注意機械手上其它選擇部件或其它設備;
4.檢查每個軸的電機剎車。
23、觸摸偏差
現象1:手指所觸摸的位置與鼠標箭頭沒有重合。
原因:示教器安裝完驅動程序后,在進行校正位置時,沒有垂直觸摸靶心正中位置。
解決:重新校正位置。
現象2:部分區域觸摸準確,部分區域觸摸有偏差。
原因:表面聲波觸摸屏四周邊上的聲波反射條紋上面積累了大量的塵土或水垢,影響了聲波信號的傳遞所造成的。
解決:清潔觸摸屏,特別注意要將觸摸屏四邊的聲波反射條紋清潔干凈,清潔時應將觸摸屏控制卡的電源斷開。
24、示教器觸摸無反應
現象:觸摸屏幕時鼠標箭頭無任何動作,沒有發生位置改變。
原因:造成此現象產生的原因很多,具體如下:
1.表面聲波觸摸屏四周邊上的聲波反射條紋上面所積累的塵土或水垢非常嚴重,導致觸摸屏無法工作;
2.觸摸屏發生故障;
3.觸摸屏控制卡發生故障;
4.觸摸屏信號線發生故障;
5.主機的串口發生故障;
6.示教器的操作系統發生故障;
7.觸摸屏驅動程序安裝錯誤。
解決:觀察觸摸屏信號指示燈,該燈在正常情況下為有規律的閃爍,大約為每秒鐘閃爍一次。
當觸摸屏幕時,示教器黑屏,這個問題比較復雜了。如果設置了背光節能,黑屏是正常的;如果誤操作了系統控制區的第二個字,也會黑屏。如果排除前兩點,則更新到最新的韌體進行查看。
編輯:lyn